| Page Five of Six |
Building a Hall Effect Gear Tooth or a Ferrous Object
PositionSensor
PositionSensor
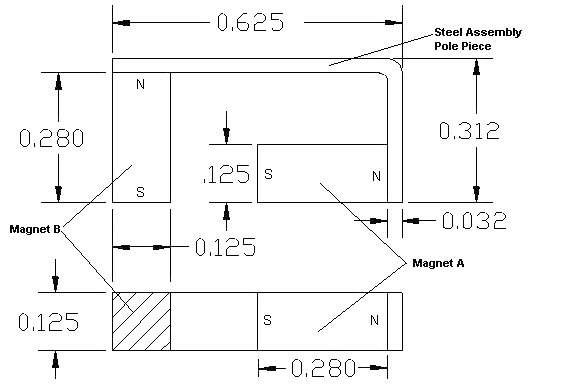
Figure Ten: This is the assembly drawing for the two magnets and the assembly pole piece.
The two magnets were made from a bonded plastic magnet that was .75 Inches in diameter
and .312 Inches thick. The magnet was being sold as a hot pad or picture hanging magnet at
a hobby shop. The magnets were sawed to size with a jig saw and sanded to their finished
shape. The finished magnets had a magnetic flux density measurement of 1200 Gauss at the
magnet ends. The pole piece was made from a piece of .032 x .125 strip steel. The .125
square end deminsions used for the magnets was selected to mate with the steel strip used for
the pole piece. The actual magnetic circuit dimensions are not critical and can be adjusted to
match the materials at hand. Position the two magnets so they fit up close to the sides of the
Hall Effect sensor that you use.
The two magnets were made from a bonded plastic magnet that was .75 Inches in diameter
and .312 Inches thick. The magnet was being sold as a hot pad or picture hanging magnet at
a hobby shop. The magnets were sawed to size with a jig saw and sanded to their finished
shape. The finished magnets had a magnetic flux density measurement of 1200 Gauss at the
magnet ends. The pole piece was made from a piece of .032 x .125 strip steel. The .125
square end deminsions used for the magnets was selected to mate with the steel strip used for
the pole piece. The actual magnetic circuit dimensions are not critical and can be adjusted to
match the materials at hand. Position the two magnets so they fit up close to the sides of the
Hall Effect sensor that you use.

Figure Eleven: This figure
presents a simulation model
of the magnetic flux density
field for the Hall Effect
Sensor's magnetic circuit
using the Qfield Magnetic
Simulation Software. The
magnetic flux density data for
the line between points A
and B is shown in Figure
Twelve.
presents a simulation model
of the magnetic flux density
field for the Hall Effect
Sensor's magnetic circuit
using the Qfield Magnetic
Simulation Software. The
magnetic flux density data for
the line between points A
and B is shown in Figure
Twelve.
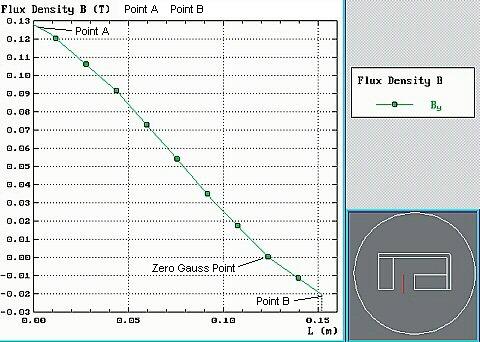
Figure Twelve: The
magnetic flux density
values for the "y" vector
of line A,B is shown in
this graph. The magnetic
flux density is about
1,275 Gauss at point A
and around -200 Gauss
at point B. The main
point is that the Zero
Gauss point is in the area
of the A,B and C,D
intersection. This Zero
point will move up and
down the A,B line as a
gear tooth or gear slot
passes by the front of the
sensor. The Hall Effect
sensor will need to be
positioned on the A,B
line where the magnetic
flux density will go above
the sensor's operate
point and back below the
sensor's release point as
the gear tooth or slot
passes the front of the
sensor.
magnetic flux density
values for the "y" vector
of line A,B is shown in
this graph. The magnetic
flux density is about
1,275 Gauss at point A
and around -200 Gauss
at point B. The main
point is that the Zero
Gauss point is in the area
of the A,B and C,D
intersection. This Zero
point will move up and
down the A,B line as a
gear tooth or gear slot
passes by the front of the
sensor. The Hall Effect
sensor will need to be
positioned on the A,B
line where the magnetic
flux density will go above
the sensor's operate
point and back below the
sensor's release point as
the gear tooth or slot
passes the front of the
sensor.
See Figure Six for a magnetic circuit that uses commercially made
magnets.
magnets.